控制技术创新
KMC 770 高级操作系统
KMC
770控制系统含有许多标准特征,这些标准特征能够增强系统性能,并简化操作。这些标准特征包括:
- 一键索引 - 根据操作员的舒适性要求对与机械臂有关的master位置进行弥补
- 动力校正 -
在索引之后能够让操作员通过机械臂对Masterl进行校正。Master控制器一旦启动,便会通过自身电力对机械臂进行校正。
- 关节锁 -
用于选择性地对一个或多个机械臂轴心进行锁定,使得Master的动作不会对已锁定的轴心产生影响。
- 关节缩放 -
改变Master控制臂对机械臂的运动比便,可以对每一个关节的缩放比例进行单独设置。
- 关节限制 - 对单独的关节移动限制进行设置,以防止机械臂对外围产
- 对夹持力的对称控制 - 极大地增强了机械臂的性能,优于现有的比例控制以及位置控制。
- 自动装载/部署 - 通过预先编制的程序,操作员可以自动对机械臂进行装载或部署。
- 动运行 -可以教导机械臂执行一些日常行为或顺序,从而为以后的使用进行永久的保存。
- 系统诊断 - 提供全面工具对系统进行评估或故障检修。

作为远程机械臂与操作员之间的重要连接,Kraft力反馈mini-master能够让操作员在舒适直觉的情况下对复杂的机械臂动作进行控制。位于单独关节上的电子致动器能够对施加于机械臂上
的力作出反应,为操作员提供力反馈。位于Master上的开关能够让操作员通过手臂动作迅速地对机械臂的核心功能进行操作,经过设计,mini-master可通过左手操作或者
右手操作。
在标准配置情况下,mini-master安装于一个结构紧凑、携带方便的操作控制装置上,这种装置可在任何表面上进行操作。操作人员可以通过一个彩色液晶显示器查看系统信息和菜单,显示器周围设有按键,
操作员可以根据操作需要选择不同的操作选项。

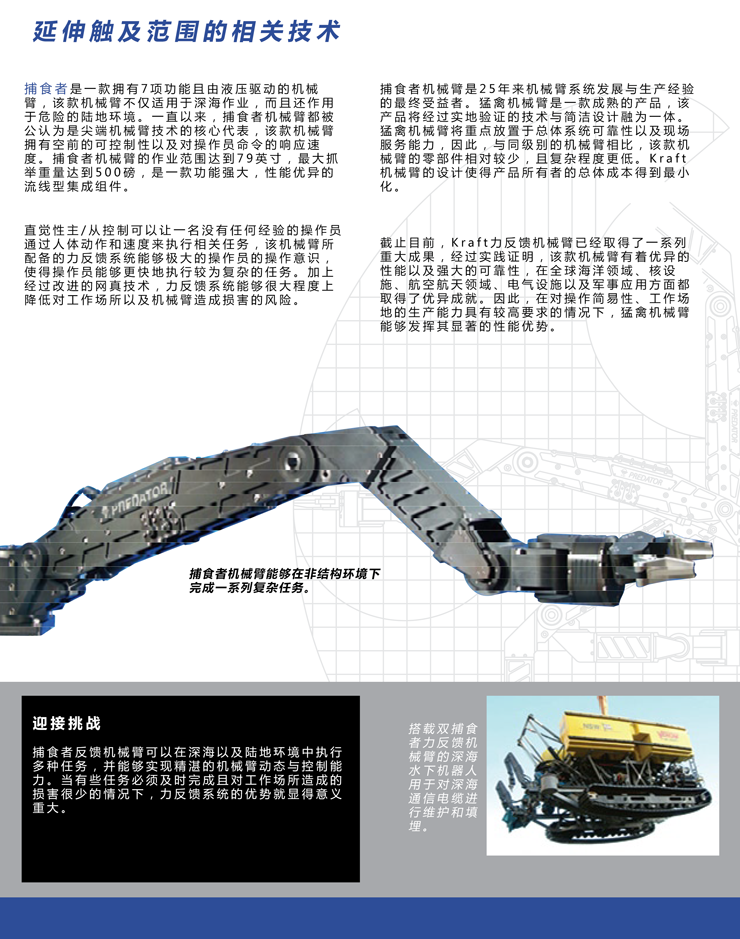
捕食者机械臂在全球范围内广泛应用于核设施拆除。如图所示,安装于Red
Zone“霍迪尼”号的捕食者机械臂用于在辐射室内执行多种拆除任务。
配备Kraft Grips以及捕食者力反馈机械臂的美国空军 “ARTS”载具用于对未爆军火进行远程处理。