|
|
水下应用
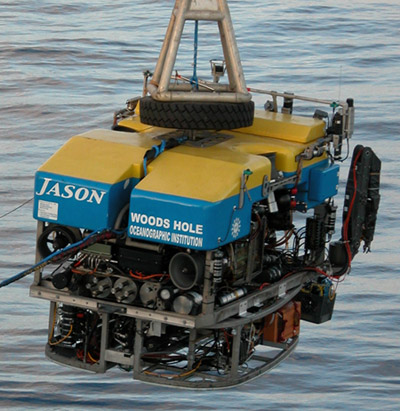
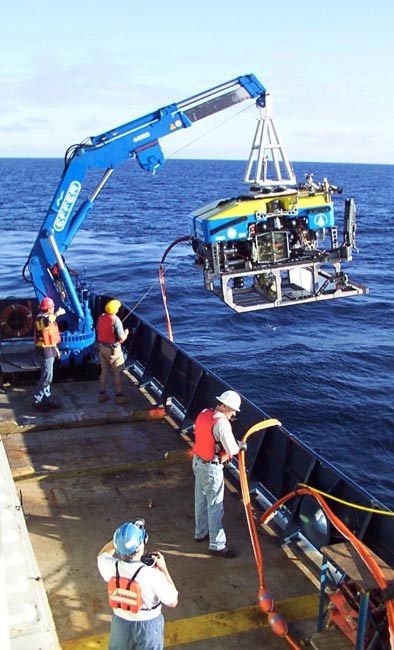
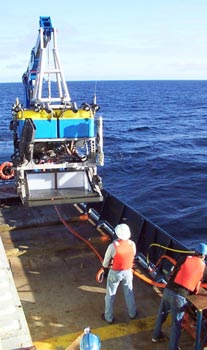
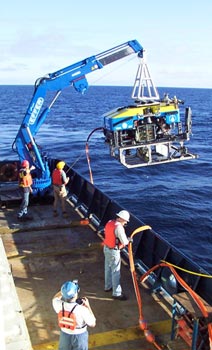
装配Kraft捕食者机械臂的伍兹霍尔“Jason”车。
点击图片放大。
在过去的25年里,Kraft为最苛刻的海底应用设计和制造了机械臂系统。作为水下机器人技术的先驱,Kraft是从水下机器人和机械臂的早期发展开始成长起来的。如今,Kraft机械臂被世界领先的海洋科学组织用于在深海环境中的海洋油气行业。
主要国际水下承包商使用Kraft机械臂执行水下任务,如海洋石油勘探,深水钻井和水下建筑活动。在海洋科学组织,我们的机械手臂常被用于执行各种任务,如生物、地质和流体样本的收集。为迎接这一挑战,推荐使用Kraft机械臂的首要原因就是其海底工作能力。简言之,我们的客户告诉我们,使用Kraft机械臂,他们可以在更短的时间内做更多的事(进行更多的科学活动)。
由于Kraft机械臂系统受到海洋科学组织内的广泛接受,其被大量应用于科学考察。Kraft力反馈控制技术极大地提高了远程机械臂打捞考古宝藏、收集的深海生物样本的效率。Kraft力反馈机械手手臂已被大量应用于世界各地的海洋探险,包括2004年著名的鲍勃·巴拉德对“泰坦尼克”号的探险。
目前使用我们的机械臂的著名组织包括:
请点击上面的链接获取这些有趣的探险信息。
点击放大图片。

伍兹霍尔海洋ROV“Jason”能够在6500米(4英里)深的水里探索。利用Kraft力反馈 捕食者机械臂,“Jason”除了可以在海底执行各种各样的任务之外,还能进行岩石样本、沉积物或海洋生物收集。
|
|
| ©
Kraft TeleRobotics, Inc. |
| 浙ICP备19040111号-3 |
|